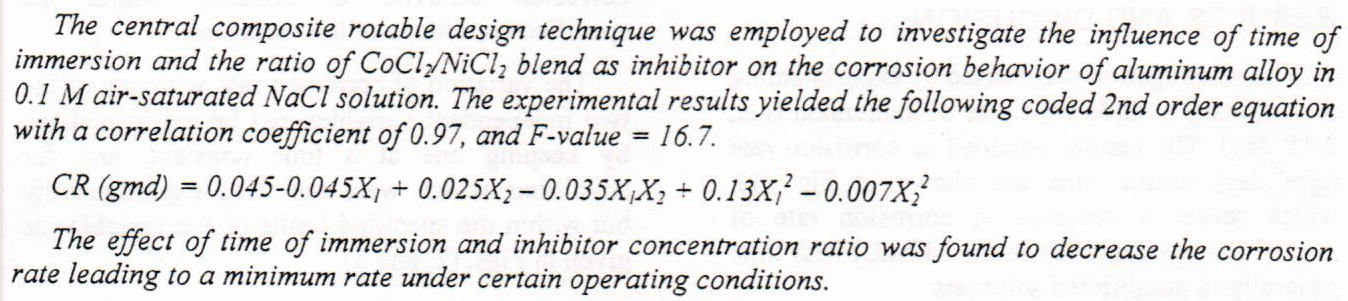
The Optimal Corrosion Inhibition of Aluminum in 0.1M NaCl Solution
Bobbin friction stir welding (BFSW) is a variant of the conventional friction stir welding (CFSW); it can weld the upper and lower surface of the work-piece in the same pass. This technique involves the bonding of materials without melting. In this work, the influence of tool design on the mechanical properties of welding joints of 6061-T6 aluminum alloy with 6.25 mm thickness produced by FSW bobbin tools was investigated and the best bobbin tool design was determined. Five different probe shapes (threaded straight cylindrical, straight cylindrical with 3 flat surfaces, straight cylindrical with 4 flat surfaces, threaded straight cylindrical with 3 flat surface and threaded straight cylindrical with 4 flat surfaces) with various dimensio
... Show MoreThe aim of this study was to increasing natural carotenoides production by a locally isolate Rodotorula mucilagenosa M. by determination of the optimal conditions for growth and production of this agents, for encouragest to use it in food application permute artificial pigments which harmfull for consumer health and envieronmental. The optimal condition of carotenoides production from Rhodotorula mucilaginosa M were studied. The results shows the best carbon and nitrogen source were glucose and yeast extract. The carotenoids a mount production was 47430 microgram ̸ litter and 47460 microgram ̸ litter, respectively, and the optimum temperature was 30°C, PH 6, that the carotenoides a mount was 47470 microgram ̸ litter and 47670 microgr
... Show MoreThe inhibitive action of Phenyl Thiourea (PTU) on the corrosion of mild steel in strong Hydrochloric acid, HCl, has been investigated by weight loss and potentiostatic polarization. The effect of PTU concentration, HCl concentration, and temperature on corrosion rate of mild steel were verified using 2 levels factorial design and surface response analysis through weight loss approach, while the electrochemical measurements were used to study the behavior of mild steel in 5-7N HCl at temperatures 30, 40 and 50 °C, in absence and presence of PTU. It was verified that all variables and their interaction were statistically significant. The adsorption of (PTU) is found to obey the Langmuir adsorption isotherm. The effect of temperature on th
... Show MoreSlag of aluminum is a residue which results during the melting process of primary and secondary aluminum production. Salt slag of aluminum is hazardous solid waste according to the European Catalogue for Hazardous Wastes. Hence, recovery of aluminum not only saves the environment, but also has advantages of financial and economic returns. In this research, aluminum was recovered and purified from the industrial wastes generated as waste from both of State Company for Electrical and Electronic Industries (Baghdad/AlWaziriya) and General Company for Mechanical Industries (Babylon/-Al-Escandria). It was found that these wastes contain tiny proportions of other elements such as iron, copper, nickel, titanium, lead, and potassium. Wastes were
... Show MoreAbstract: When it comes to applications in welding, cutting, and surface engineering, the utilization of high-power fiber-delivered beams from solid-state lasers offers several benefits. This paper addresses the issue of cleaning the surface of the samples with different spot sizes (50, 100 and 200) (industrial ytterbium fiber laser) to prepared it to be welded. Angular laser cleaning with incident angles (5, 10, 15, 20, 25, 30) ° with different powers (3, 5, 7, 10) W and hatch distance 0.001 was use for implemented.
The ability of using aluminum filings which is locally solid waste was tested as a mono media in gravity rapid filter. The present study was conducted to evaluate the effect of variation of influent water turbidity (10, 20and 30 NTU); flow rate(30, 40, and 60 l/hr) and bed height (30and60)cm on the performance of aluminum filings filter media for 5 hours run time and compare it with the conventional sand filter. The results indicated that aluminum filings filter showed better performance than sand filter in the removal of turbidity and in the reduction of head loss. Results showed that the statistical model developed by the multiple linear regression was proved to be
valid, and it could be used to predict head loss in aluminum filings
The synthesis of nanoparticles (GNPs) from the reduction of HAuCl4 .3H2O by aluminum metal was obtained in aqueous solution with the use of Arabic gum as a stabilizing agent. The GNPs were characterized by TEM, AFM and Zeta potential spectroscopy. The reduction process was monitored over time by measuring ultraviolet spectra at a range of λ 520-525 nm. Also the color changes from yellow to ruby red, shape and size of GNP was studied by TEM. Shape was spherical and the size of particles was (12-17.5) nm. The best results were obtained at pH 6.
In this study, aluminum nanoparticles (Al NPs) were prepared using explosive strips method in double-distilled deionized water (DDDW), where the effect of five different currents (25, 50, 75, 100 and 125 A) on particle size and distribution was studied. Also, the explosive strips method was used to decorate zinc oxide particles with Al particles, where Al particles were prepared in suspended from zinc oxide with DDDW. Transmission electron microscopy (TEM), UV-visible absorption spectroscopy, and x-ray diffraction are used to characterize the nanoparticles. XRD pattern were examined for three samples of aluminum particles and DDDW prepared with three current values (25, 75 and 125 A) and three samples prepared with the same currents for zin
... Show More