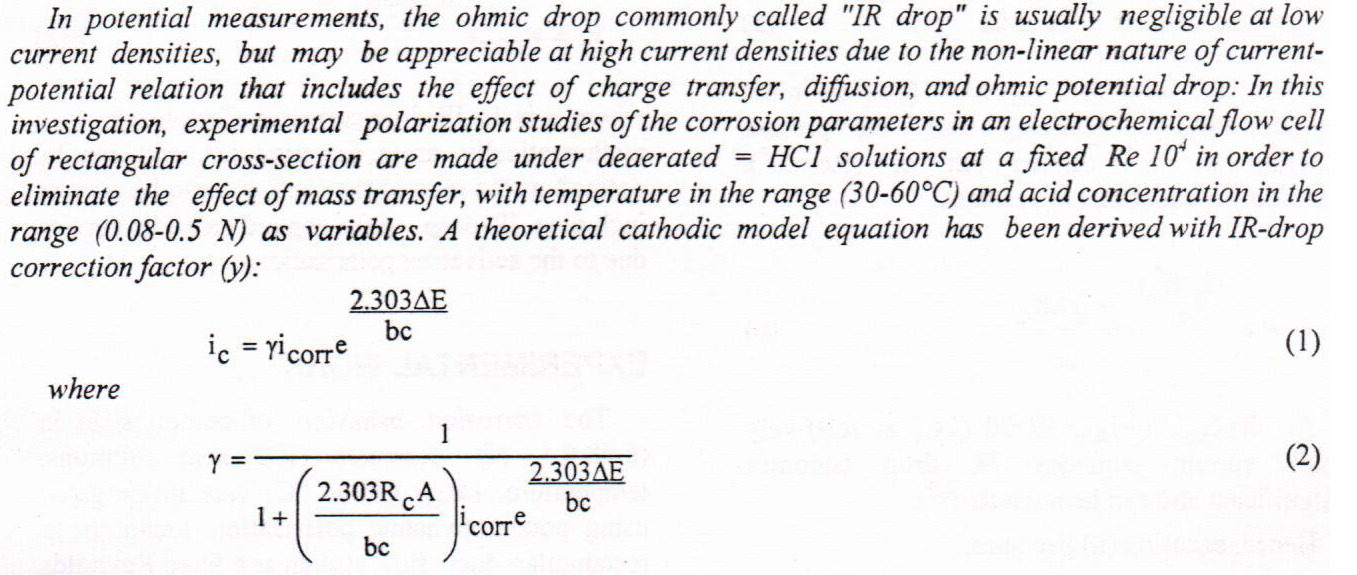
Determination of Corrosion Parameters for a Cathodic Reaction Complicated by IR Drop Effect in a Flow System
The research aimed at measuring the compatibility of Big date with the organizational Ambidexterity dimensions of the Asia cell Mobile telecommunications company in Iraq in order to determine the possibility of adoption of Big data Triple as a approach to achieve organizational Ambidexterity.
The study adopted the descriptive analytical approach to collect and analyze the data collected by the questionnaire tool developed on the Likert scale After a comprehensive review of the literature related to the two basic study dimensions, the data has been subjected to many statistical treatments in accordance with res
... Show MoreThis research aims at the possibility of rationalizing business organizations according to the strategic planning directions which have been developed to deal with many problems faced by business organizations, including the General Company for Automobile and Machinery Trade which was chosen as a research society, and several research problems were diagnosed, including an increase in the numbers of employees who constitute hidden unemployment, lack of work in the system of job specialization, and the organizational structure which is the non-application of the company to a modern administrative model. The importance of the research is that the company being investigated is a pioneer in its field of work and seeks to achieve custo
... Show MoreAssessing performance efficiency is critical to the management need for oversight, planning, and continuous periodic evaluation of the multiple activities of Northern Cement State Company in order to determine the level of achievement of the objectives set, and to correct the deviations and delays that the evaluation shows and limitation of liability. What cannot be measured cannot be managed. The aim of this research is to highlight the impact of using BSC, financial and non-financial, to give comprehensive and clear picture of the company's performance and to measure the quality of its performance by using six-sigma and the level of deviations in achieving the planned goals. Therefore, four-key hypotheses were formulated for th
... Show MoreG-system composed of three isolates G3 ( Bacillus),G12 ( Arthrobacter )and G27 ( Brevibacterium) was used to detect the mutagenicity of the anticancer drug, cyclophosphamide (CP) under conditions similar to that used for standard mutagen, Nitrosoguanidine (NTG). The CP effected the survival fraction of isolates after treatment for 15 mins using gradual increasing concentrations, but at less extent comparing to NTG. The mutagenic effect of CP was at higher level than that of NTG when using streptomycin as a genetic marker, but the situation was reversed when using rifampicin resistant as a report marker. The latter effect appeared upon recording the mutagen efficiency (ie., number of induced mutants/microgram of mutagen). Measuring the R
... Show MoreTax information system is one of the most important means that help the tax administration to reach the real income of the taxpayer, and the problem of research came in the General Authority for Tax ,The next question (Does the control carried out by the Central Bank on foreign remittances to reach the real income of the taxpayer). The research is gaining importance by focusing on the Central Bank's control over foreign remittances, and how to use this control to finance the tax information system. The relationship between the Central Bank's control over foreign remittances and the tax information system.The study has reached a number of recommendations, the most important of which are the following: The work of an integrated information
... Show MoreIn this study, a proposed process for the utilization of hydrogen sulphide separated with other gases from omani natural gas for the production of sulphuric acid by wet sulphuric acid process (WSA) was studied. The processwas simulated at an acid gas feed flow of 5000 m3/hr using Aspen ONE- V7.1-HYSYS software. A sensitivity analysis was conducted to determine the optimum conditions for the operation of plant. This included primarily the threepacked bed reactors connected in series for the production of sulphur trioxidewhich represented the bottleneck of the process. The optimum feed temperature and catalyst bed volume for each reactor were estimated and then used in the simulation of the whole process for tw
... Show MoreCore decompression is one of the commonest used techniques in the handling of osteonecrosis of the pre-collapsed head of the femur. Core decompression had succeeded in preserving the hip joint and delaying the requisite for total hip replacement, but it had failed in the induction of osteogenesis in the necrotic area, thus augmenting core decompression with biological agents to induce osteogenic activity. To assess the effects of platelet-rich plasma in non-traumatic avascular necrosis of the hip joint (early stage) after core decompression. Interventional comparative study for twenty-four patients (32 hip joints) with AVN of the head of the femur was involved in this prospective study, and they were separated into two groups of 16
... Show MoreBACKGROUND: Femoral shaft fracture is a common fracture in pediatric age group reaching 62% of all fracture shaft femur in children in spite of rapid union rate and successful conservative treatment but some cases need surgical intervention and one of the methods using plate and screw by the lateral approach. AIM: This study aims to compare functional outcome fixation of mid-shaft femur fracture in children by plate and screws between (subvastus lateralis and transvastus lateralis) regarding infection, union, and limitation of knee movement. PATIENT AND METHOD: The study was done on 30 children who had diaphyseal fracture femur in Al-Kindy Teaching Hospital in period (April 2018–April 2020) with 6 months follow-up, and the pa
... Show More