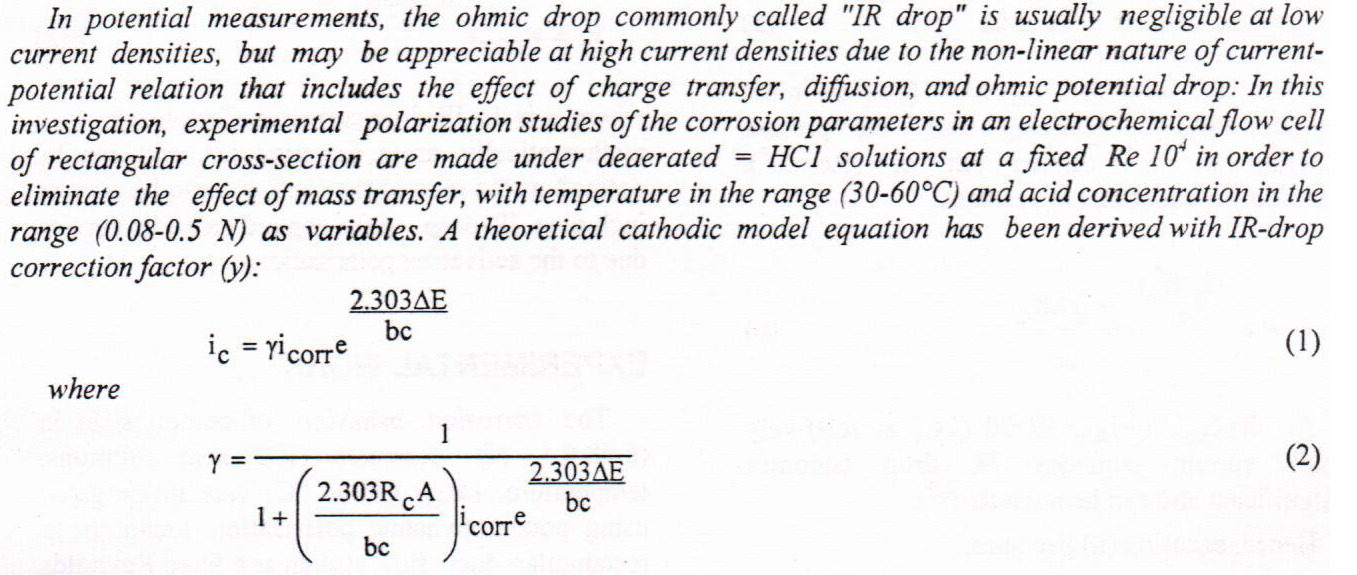
Determination of Corrosion Parameters for a Cathodic Reaction Complicated by IR Drop Effect in a Flow System
We propose an intraguild predation ecological system consisting of a tri-trophic food web with a fear response for the basal prey and a Lotka–Volterra functional response for predation by both a specialist predator (intraguild prey) and a generalist predator (intraguild predator), which we call the superpredator. We prove the positivity, existence, uniqueness, and boundedness of solutions, determine all equilibrium points, prove global stability, determine local bifurcations, and illustrate our results with numerical simulations. An unexpected outcome of the prey's fear of its specialist predator is the potential eradication of the superpredator.
The importance of physical and nonphysical architectural design values made architectural designers need good experience to be experts of architectural values reasonably without neglecting any value in the design process. The importance of such values made that ignoring any values and mistakes occurs in the design process. Simultaneously, architectural designers' different nature and the difference in their experiences are causing different understandings of the design values, thus causing architectural mistakes. The research problem appears from the randomly propagating of mistakes in contemporary architecture, which is about to become a phenomenon in Al Sulaymaniyah city. The research aims to find the main reason
... Show MoreThis study examines the relationship between the increase in the number of tourists coming to Tunisia and GDP during the period 1995-2017, using the methodology of joint integration, causal testing and error correction model. The research found the time series instability of the logarithm of the number of tourists coming to Tunisia and the output logarithm but after applying the first differences, these chains become stable, THUS these time series are integrated in the first differences. Using the Johansson method, we found the possibility of a simultaneous integration relationship between the logarithm of the number of tourists coming to Tunisia and the logarithm of GDP in Tunisia, and there is a causal relationship in one direc
... Show MoreSubsurface soil water retention (SWRT) is a recent technology for increasing the crop yield, water use efficiency and then the water productivity with less amount of applied water. The goal of this research was to evaluate the existing of SWRT with the influence of surface and subsurface trickle irrigation on economic water productivity of cucumber crop. Field study was carried out at the Hawr Rajab district of Baghdad governorate from October 1st, to December 31st, 2017. Three experimental treatments were used, treatment plot T1 using SWRT with subsurface trickle irrigation, plot T2 using SWRT with surface trickle irrigation, while plot T3 without using SWRT and using surface tickle irrigation system. The obtained results showed th
... Show MoreBackground: Cigarette smoking is an important risk factor that has a clear strong association with the prevalence and severity of chronic periodontitis (CP). Salivary biochemical parameters may be affected by both smoking and CP together. Materials and methods: Eighty systematically healthy male patients were included in this study. They were grouped based on their periodontal and smoking status. Unstimulated whole saliva (UWS) was collected from all subject. Salivary flow rate (FR) was measured during sample collection. Parameters such as salivary pH, total protein (TP), albumin (Alb), total fucose (TF), protein bound fucose (PBF) and C-reactive protein (CRP) were estimated. Results: Salivary flow rate was not altered regarding to smoking
... Show MoreLeukemia or cancer of the blood is the most common childhood cancer, Acute lymphoblastic leukemia (ALL), is the most common form of leukemia that occurs in children. It is characterized by the presence of too many immature white blood cells in the child’s blood and bone marrow, Acute lymphoblastic leukemia can occur in adults too, treatment is different for children. Children with ALL develop symptoms related to infiltration of blasts in the bone marrow, lymphoid system, and extramedullary sites, such as the central nervous system (CNS). Common constitutional indications consist of fatigue (50%), pallor (25%), fever (60%), and weight loss (26%). Infiltration of blast cells in the marrow cavity and periosteum often lead to bone
... Show MoreMost studies indicated that the values of atmospheric variables have changed from their general rates due to pollution or global warming etc. Hence, the research indicates the changes of direct solar radiation values over a whole century i.e. from 1900 to 2000 depending on registered data for four cities, namely (Mosul - Baghdad - Rutba - Basra. Moreover, attemptsto correlate the direct solar radiation with the temperature values have been recorded over that period. The results showed that there is a decreasing pattern of radiation quantities over time throughout the study period, where the value of direct radiation over the city of Baghdad 5550 w/m2 was recorded in the year 1900, but this ratio decreased cle
... Show MoreThe main objectives of this study are to study the enhancement of the load-carrying capacity of Asymmetrical castellated beams with encasement the beams by Reactive Powder Concrete (RPC) and lacing reinforcement, the effect of the gap between top and bottom parts of Asymmetrical castellated steel beam at web post, and serviceability of the confined Asymmetrical castellated steel. This study presents two concentrated loads test results for four specimens Asymmetrical castellated beams section encasement by Reactive powder concrete (RPC) with laced reinforcement. The encasement of the Asymmetrical castellated steel beam consists of, flanges unstiffened element height was filled with RPC for each side and laced reinforced which are use
... Show More